嵌入式ROS运行时支持
总体介绍
机器人尤其服务机器人领域近年来发展迅速,ROS(Robot Operating System)作为一个适用于机器人的开源中间件框架,已经在众多领域得到广泛应用。然而,常规的ROS系统存在较多的平台约束,通常与Ubuntu等桌面操作系统 强依赖,这限制了其在更广泛的嵌入式设备上的应用。ROS目前有两个主要版本,ROS1和ROS2。ROS1于2010年发布,ROS2于2017年发布,ROS2相较于ROS1有较大的改进,详细介绍请参考 ROS2入门教程 。
为了使ROS2能够在高度定制化的嵌入式Linux系统上运行,通过Yocto项目构建的meta-ROS层成为了关键途径。meta-ROS为ROS2提供了必要的软件包配方和配置,使其能够适配基于Yocto的嵌入式Linux系统。
尽管meta-ROS层为ROS2支持提供了基础,但其应用门槛较高,且未充分考虑嵌入式运行时的关键场景要素,如实时性能和资源限制。这使得开发者在将ROS2应用于嵌入式项目时面临挑战。
openEuler Embedded对ROS2的运行时支持,旨在提高易用性、解决高门槛问题的同时,构建机器人嵌入式运行时的竞争力。openEuler Embedded通过简化ROS2的集成流程、提供实时性能优化和小型化支持,使得ROS2能 够在资源受限的嵌入式设备上高效运行。
框架
openEuler Embedded中ROS2运行时整体架构图如下所示,分为运行视图和构建视图,构建视图总体基于开源meta-ros layer meta-ros 作为基础。
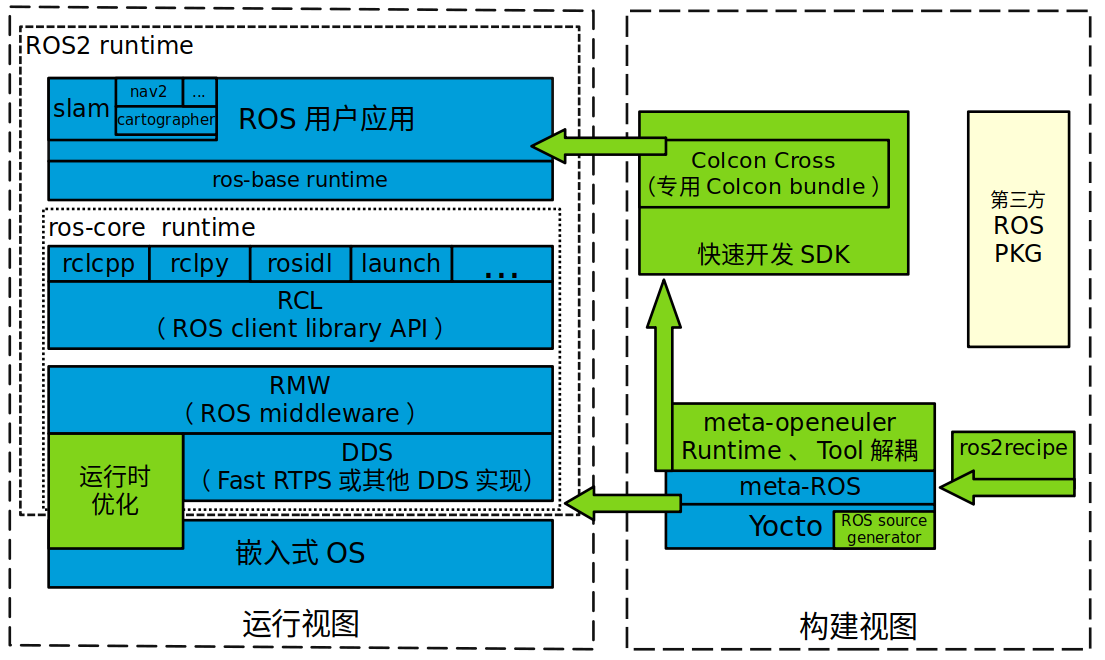
图 1 openEuler Embedded中ROS运行时支持基础架构
其中,
meta-openuler层 提供依赖解耦和嵌入式定制(针对编译类、观测类、仿真类等工具对onboard/运行时部署进行解耦),负责镜像快速集成和SDK工具的生成。
ros2recipe模块 提供了第三方ros源码到yocto配方的转换工具(不同于社区原生meta-ros生成工具superflore),作为meta-openeuler镜像快速集成的输入。
快速开发SDK模块 提供了第三方ros源码到运行时应用的交叉编译转化。
运行时优化模块 联通OS侧特性,链接混合关键部署等RTOS实时及总线能力,最终提供复杂系统的实时和通信解决方案。
镜像构建指南
openEuler Embedded 支持ROS运行时相关组件的单独构建和镜像集成构建案例。
构建指导
使用oebuild进行构建即可,具体使用方式参照oebuild指导,构建qemu-ros参照如下命令:
$ oebuild generate -p qemu-aarch64 -f openeuler-ros -d aarch64-qemu-ros $ oebuild bitbake $ bitbake openeuler-image
构建树莓派参照如下命令
$ oebuild generate -p raspberrypi4-64 -f openeuler-ros -d raspberrypi4-64-ros $ oebuild bitbake $ bitbake openeuler-image
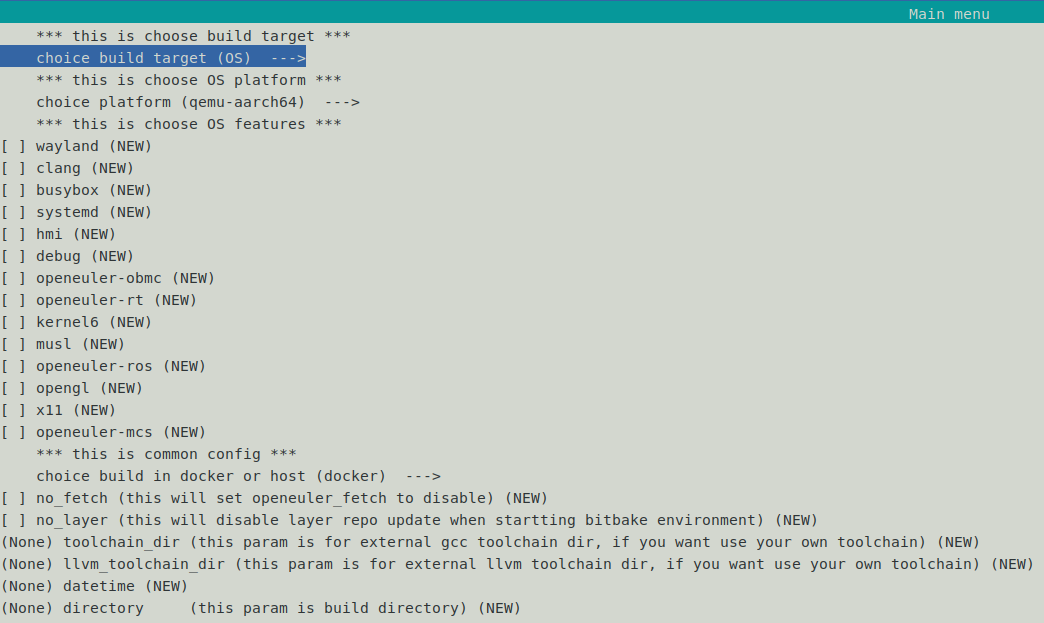
除了使用上述命令进行配置文件生成之外,还可以使用如下命令进入到菜单选择界面进行对应数据填写和选择,此菜单选项可以替代上述命令中的oebuild generate,选择保存之后继续执行上述命令中的bitbake及后续命令即可。
oebuild generate具体界面如下图所示:
Note
当前只要开启了ros特性,openeuler-image镜像会默认集成ros-core核心功能
基于树莓派的ROS特性镜像还加入了SLAM典型功能(相关导航和制图典型场景功能正在完善中,欢迎试用和加入贡献)
另外按照嵌入式运行时原则,请尽量不在目标系统中集成编译类、观测类、仿真类等更适合在开发主机上运行的工具
- 注意 :
pcl点云库比较耗编译主机的内存资源,对该库进行了线程限制(-j 2),可参见对应pcl的bbappend配方。 另外,虽已限制在(-j 2),其编译所需的主机内存要求需大于等于14G(加上swap空间)。 若您的编译主机配置足够,可解开(-j 2)限制,例如在16线程32GB内存的机器解除限制后无法成功编译, 在24线程64GB内存的机器上测试可解除线程限制成功编译。
镜像使用示例
以qemu-aarch64和originbot小车(树莓派作为主控板)为例:
1.QEMU多机部署和demo_nodes_cpp示例
step1: 部署两个QEMU机器
在host中创建网桥br0
brctl addbr br0启动qemu1
qemu-system-aarch64 -M virt-4.0 -m 1G -cpu cortex-a57 -nographic \ -kernel zImage \ -initrd <openeuler-image-qemu-xxx.cpio.gz> \ -device virtio-net-device,netdev=tap0,mac=52:54:00:12:34:56 \ -netdev bridge,id=tap0Attention
首次运行如果出现如下错误提示
failed to parse default acl file `/usr/local/libexec/../etc/qemu/bridge.conf' qemu-system-aarch64: bridge helper failed则需要向指示的文件添加”allow br0”:
echo "allow br0" > /usr/local/libexec/../etc/qemu/bridge.conf启动qemu2
qemu-system-aarch64 -M virt-4.0 -m 1G -cpu cortex-a57 -nographic \ -kernel zImage \ -initrd openeuler-image-qemu-aarch64-2023xxx.rootfs.cpio.gz \ -device virtio-net-device,netdev=tap1,mac=52:54:00:12:34:78 \ -netdev bridge,id=tap1Attention
qemu1与qemu2的mac地址需要配置为不同的值。
配置IP
配置host的网桥地址
ifconfig br0 192.168.10.1 up配置qemu1的网络地址
ifconfig eth0 192.168.10.2配置qemu2的网络地址
ifconfig eth0 192.168.10.3step2: 分别在两个QEMU机器中运行demo_nodes_cpp发布和订阅
qemu1执行
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # demo消息订阅 $ ros2 run demo_nodes_cpp listenerqemu2执行
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # demo消息发布 $ ros2 run demo_nodes_cpp talkerNote
单机通信同理,在同一台设备上通过多个终端分别执行demo_nodes_cpp发布和订阅即可,属于ROS常规用法,不再详述。
2.originbot小车制图和导航示例(树莓派作为主控板)
step1: originbot小车雷达USB、底盘驱动板串口完成连接
以树莓派作为主控板为例,假如雷达使用USB串口且对应设备为ttyUSB0、底盘串口使用GPIO 14/15且对应ttyS0
Note
以上串口设备为示例配置,雷达串口号和originbot底盘串口号用户可自行修改配置,配置文件位置例(直接修改即生效):
/usr/share/originbot_base/launch/robot.launch.py
/usr/share/originbot_bringup/param/ydlidar.yaml
step2: 环境准备,并配置originbot小车和观测PC处于同一网段
以树莓派作为主控板通过无线网络连接为例(可使用无线路由器或无线热点,需要小车和观测PC处于同一个网段)
openEuler Embedded树莓派使能无线连接参见 openEuler Embedded网络配置-Wi-Fi网络配置
step3: 通过观测PC,远程ssh登录originbot小车,执行运行时ROS应用
以建图为例,整体过程和originbot官网过程一样,可参考
首先,ssh登录originbot小车终端1,执行如下命令:
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # 启动机器人底盘和激光雷达: $ ros2 launch originbot_bringup originbot.launch.py use_lidar:=true然后,ssh登录originbot小车终端2,执行如下命令:
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # 启动cartographer建图算法: $ ros2 launch originbot_navigation cartographer.launch.pystep4: 在观测端PC,启动上位机可视化软件以便查看SLAM的完整过程,同时启动上位机键盘控制远程小车
整体过程和originbot官网过程一样,可参考
首先,观测端PC开启一个终端,进入ROS环境后启动rviz观测软件
$ ros2 launch originbot_viz display_slam.launch.py然后,观测端PC开启另一个终端,进入ROS环境后启动键盘控制节点用于控制小车,并按照提示控制小车完成建图
$ ros2 run teleop_twist_keyboard teleop_twist_keyboardstep5: 保存运行时数据(建图数据等)
以建图保存为例,整体过程和originbot官网过程一样,可参考
不要关闭之前步骤的端口,ssh登录originbot小车终端3,执行如下命令
# ROS环境变量初始化 $ source /etc/profile.d/ros/setup.bash # 保存地图: $ ros2 run nav2_map_server map_saver_cli -f my_map --ros-args -p save_map_timeout:=10000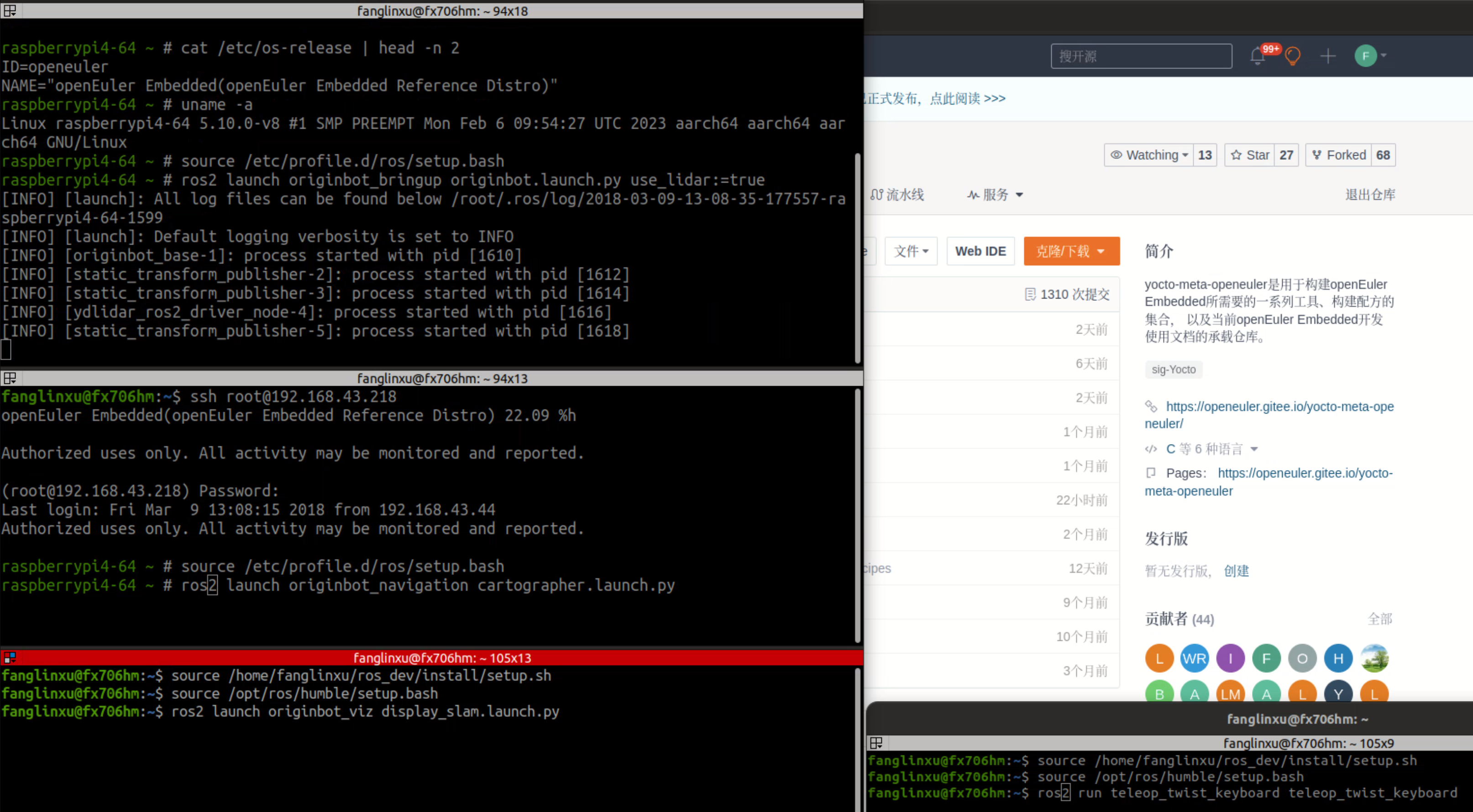
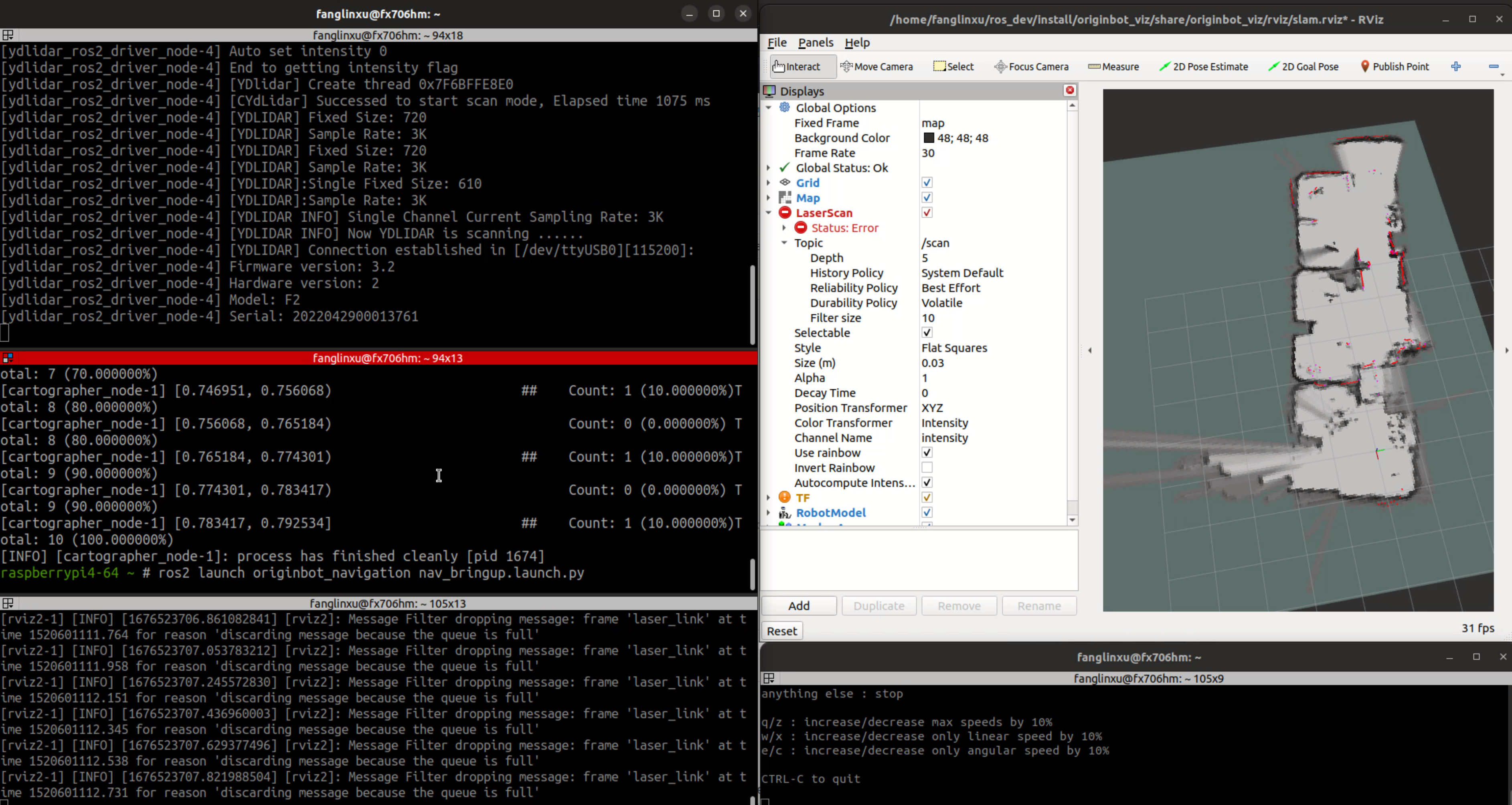
图 2 openEuler Embedded中ROS SLAM DEMO示例
Note
其他应用如导航类似,请直接参考orinbot官方资料。如自主导航,将建好的地图至于对应包位置即可, 参见 originbot 自主导航
快速开发SDK
使用说明
openEuler Embedded支持ROS2快速开发SDK,目前支持在主机或者oebuild初始化的容器中,通过安装构建生成的SDK,对ROS包进行快速交叉编译。目前支持colcon编译工具,和基础colcon用法一致。
使用约束
和常规colcon一样,我们支持了colcon交叉编译基本框架,不过由于ROS2软件包的语言和依赖库多种多样,目前仅支持C/C++/Python三种常用语言的软件包,而类似RUST等依赖cargo的软件包还不支持。欢迎开发者持续贡献openEuler Embedded社区。
使用方法
1. 在构建完成镜像后,通过populate_sdk生成SDK
# 以树莓派ROS2镜像为例 $ oebuild generate -p raspberrypi4-64 -f openeuler-ros -d raspberrypi4-64-ros $ oebuild bitbake # 在conf/local.conf中,设置 OPENEULER_PREBUILT_TOOLS_ENABLE = "no" ,这样就可以尽可能 # 生成nativesdk所需要的工具 $ bitbake openeuler-image $ bitbake openeuler-image -c populate_sdkNote
如果要使用ROS2 SDK,请确认
conf/local.conf中OPENEULER_PREBUILT_TOOLS_ENABLE = “no” ,只有这样SDK中才会包含 colcon, cmake, python, make等主机工具,可以进行ROS2应用的开发。随后在
output/[时间戳]/目录下即可找到对应SDK安装文件,例如openeuler-glibc-x86_64-openeuler-image-cortexa72-raspberrypi4-64-toolchain-24.03.sh
2. SDK的安装和初始化
已获得SDK的上层应用开发者,可直接从此节开始进行参考
(1). 安装1中生成的SDK的sh安装脚本
假设SDK脚本位于目录:file:/home/openeuler/build/raspberrypi4-64/output/20230523023324`
$ cd /home/openeuler/build/raspberrypi4-64/output/20230523023324 $ ./openeuler-glibc-x86_64-openeuler-image-cortexa72-raspberrypi4-64-toolchain-23.03.sh # 输入安装目录,假设为“/home/openeuler/build/raspberrypi4-64/output/20230523023324/sdk”,目录请事先创建好,按“y”确认 $ /home/openeuler/build/raspberrypi4-64/output/20230523023324/sdk $ y(2). 根据提示执行SDK初始化
$ . /home/openeuler/build/raspberrypi4-64/output/20230523023324/sdk/environment-setup-cortexa72-openeuler-linux此外,除了初始化上述SDK的环境变量,您无需额外source ros.setup等ROS工作空间,在SDK内部,我们已经准备好了,而SDK提供的colcon,会将colcon命令执行目录自动作为ROS的新增工作空间。
3. 通过colcon交叉编译ROS包
您只需要进入到ros包工程或colcon工程的工作路径,执行colcon进行编译即可,将自动进行交叉编译。
$ cd your_rospkg_workspace $ colcon build --cmake-args -DBUILD_TESTING=False # 注: 这里--cmake-args -DBUILD_TESTING=False 参数是必要项,顾名思义,是为了禁止做不必要的构建时测试,构建时测试需不适用于SDK,且SDK没有集成相关组件。完成后,和colcon用法一样,在工作目录将生成install文件夹,即交叉编译的目标产物。
4. 部署和运行(重要)
对于基于C/C++的ROS2软件包,colcon生成的install可以直接拷贝到目标机器上进行部署运行, 通过如下命令在目标系统上进行工作目录的初始化:
$ cd /ros_runtime/install $ source /etc/profile.d/ros/setup.bash # 初始化ROS工作目录 $ source setup.bash # 将当前目录,加入到ROS的额外工作目录Attention
请尽量使用setup.bash, 如果使用setup.sh, 需要提前设置COLCON_CURRENT_PREFIX变量为目标系统上的工作目录路径,如 不设置,则setup.sh会使用开发主机上的工作目录路径,从而造成失败。
对于基于python的ROS2软件包,并不会发生实际的构建,而是将python代码打包安装,但由于setuptool的限制,需要把install目录下 由setuptool中easy install所生成的wrapper script中shebang行中指向的python解释器路径替换为目标机器上的python解释器路径, 然后拷贝到目标机器上运行即可。具体以ROS2的demo_nodes_py为例,会在
/install/demo_nodes_py/lib/demo_nodes_py/下生成 相应的wrapper script,就需要修改各个wrapper script中的shebang行中的python解释器路径。#!/home/openeuler/sdk/sysroots/x86_64-openeulersdk-linux/usr/bin/python3 # EASY-INSTALL-ENTRY-SCRIPT: 'demo-nodes-py==0.20.5','console_scripts','talker' import re import sys改为
#!/usr/bin/python3 # EASY-INSTALL-ENTRY-SCRIPT: 'demo-nodes-py==0.20.5','console_scripts','talker' import re import sys
关于ROS源码
当前src-openeuler已集成ROS humble的所有软件源码,对应通过yocto-meta-openeuler/.oebuild/目录下的maplist.yaml和manifest.yaml可以查询源码包列表和基线。
所有ROS软件包,默认都加上了openeuler_source.bbclass,yocto构建时将自动映射软件包基线,若需定制且您有yocto经验,可参见相关实现: openeuler_source.bbclass
快速镜像集成(ros2recipe)
现状: ros2recipe当前还处于前期开发阶段,在依赖解析部分还存在较多工作,其原理类似meta-ros的生成工具superflore。
例子: 我们在yocto工程中集成了originbot ros第三方包,其基础bb配方是通过ros2recipe工具转化,但目前还需要增加bbappend文件来适配部分依赖。
其他说明: superfores能够实现以一个ROS版本生成全量官方ROS组件包,对整体ROS和oe层进行了复杂的依赖关联,但不支持将独立的第三方包转换为yocto配方。
针对该场景,ros2recipe如何能够更好更快的补全依赖关系、减少手工bbappend的适配,是一个很有挑战性的工作。需要大量的案例进行逐步完善,在此期待您的贡献。
使用方法
yocto-meta-openeuler/scripts/ros2recipe.sh
ROS2 SDK上层开发者常见FAQ
问:我在开发容器中安装好了SDK,也编译过我的工程了,过了几天,我再进入容器再编译同样工程,却不行了?
答:不管SDK安装在哪里(不管是否为容器和主机的共享目录),SDK会依赖容器中的非共享目录的配置内容,而容器如果没有及时保存(断电等原因),包括环境变量的这些数据都会丢失。
在此建议您,如果关机后重启,建议重新安装SDK。且不管在任何场景,只要重新进入容器,都需要初始化SDK的环境变量。
问:我在ubuntu中调试了一个ROS应用包,代码用SDK编译却报错头文件找不到,比如#include <nav_msgs/msg/odometry.hpp>,这是什么原因?
答:您可以确认SDK的安装路径中,是否存在对应文件,比如odometry.hpp,您会发现对应文件存在于xxx/nav_msgs/nav_msgs/msg/odometry.hpp的目录,那么大概率是因为您的ROS应用包的CMakeLists.txt中缺少对nav_msgs的依赖描述
针对上面问题,请确保您的CMakeLists.txt配置文件中:(1)find_package(nav_msgs REQUIRED) (2)ament_target_dependencies([pkgname] xxxxx nav_msgs)包含nav_msgs的依赖信息。
而如果ubuntu没有问题,可能是因为ubuntu的依赖软件安装目录没有分离成独立目录,正好在inlcude所在的一级目录恰巧被找到了,而严谨的做法是需要在CMakeLists中描述清楚依赖的。